Автоматизированная система управления в зависимости от ее назначения и программного обеспечения может быть системой сбора данных, системой диспетчерского или автоматического управления, системой контроля, испытаний, диагностики и т.д. Простейший вариант автоматизированной системы управления строится на основе компьютера, устройств ввода-вывода, датчиков и исполнительных устройств.
Существует огромное разнообразие датчиков (температуры, влажности, давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты, момента, освещенности, шума, объема, количества теплоты, тока, уровня и др.), которые преобразуют физическую величину в электрический сигнал. Если параметры сигнала не согласуются с параметрами входа аналого-цифрового преобразователя (АЦП) или не соответствует стандарту (например, входной величиной АЦП является напряжение в диапазоне 0...10 В, а датчик (термопара) имеет выходное напряжение в диапазоне от 0 до 100 мВ), то используют измерительный преобразователь, который обеспечивает нормализацию сигнала датчика (приведение к стандартным диапазонам изменения, обеспечение линейности, компенсацию погрешности, усиление и т.п.). Измерительные преобразователи обычно совмещают с модулями аналогового ввода.
Измерительные преобразователи могут иметь встроенный АЦП или ЦАП (цифро-аналоговый преобразователь), а также микропроцессор для линеаризации характеристик датчика и компенсации погрешностей аналоговой части системы. В последнее время получили распространение цифровые датчики, объединяющие в себе первичный преобразователь физической величины в электрический сигнал, измерительный преобразователь и АЦП.
Для ввода в компьютер аналоговых сигналов служат модули аналогового ввода. Модули ввода могут быть общего применения (универсальные) или специализированные. Примерами универсального модуля ввода являются модули, которые воспринимают сигналы напряжения в диапазонах ±150 мВ, ±500 мВ, ±1 В, ±5 В, ±10 В и тока в диапазоне ±20 мА. Примером специализированного модуля является модуль ввода сигналов термопар, который работает только с термопарами и содержит встроенные во внутреннюю память модуля таблицы поправок для компенсации нелинейностей термопар и температуры холодного спая.
Кроме модулей аналогового ввода широко распространены модули дискретного ввода, которые не содержат АЦП и позволяют вводить сигналы, имеющие два уровня (например, сигналы от концевых выключателей, датчиков открывания двери, пожарных датчиков, охранных датчиков движения и т. п.). Уровни входных сигналов модулей дискретного ввода могут изменяться в диапазоне, как правило, 0...24 В или 0..220 В. Модули с входом 220 В используются, например, для регистрации наличия напряжения на клеммах электродвигателя или нагревательного прибора.
Отдельное место занимают устройства счетного ввода, которые имеют дискретный вход и позволяют считать количество или частоту следования импульсов. Их используют, например, для измерения скорости вращения вала электродвигателя или подсчета продукции на конвейере.
Компьютер обычно является «мозгом» автоматизированной системы. Он принимает сигналы датчиков, исполняет записанную в него программу и выдает необходимую информацию в устройство вывода. Коммуникации между компьютером и устройствами ввода-вывода выполняются через последовательные интерфейсы, например, USB, CAN, RS-232, RS-485, RS-422, Ethernet или параллельный интерфейс LPT. Иногда устройства ввода-вывода выполняют в виде плат, которые вставляют непосредственно в компьютер, в разъемы шины PCI. Достоинством плат является возможность получения высокой пропускной способности каналов ввода-вывода, что трудно достижимо при использовании внешних устройств с последовательным портом. Недостатком является более высокий уровень электромагнитных наводок от компьютера и конструктивные ограничения на количество каналов ввода-вывода.
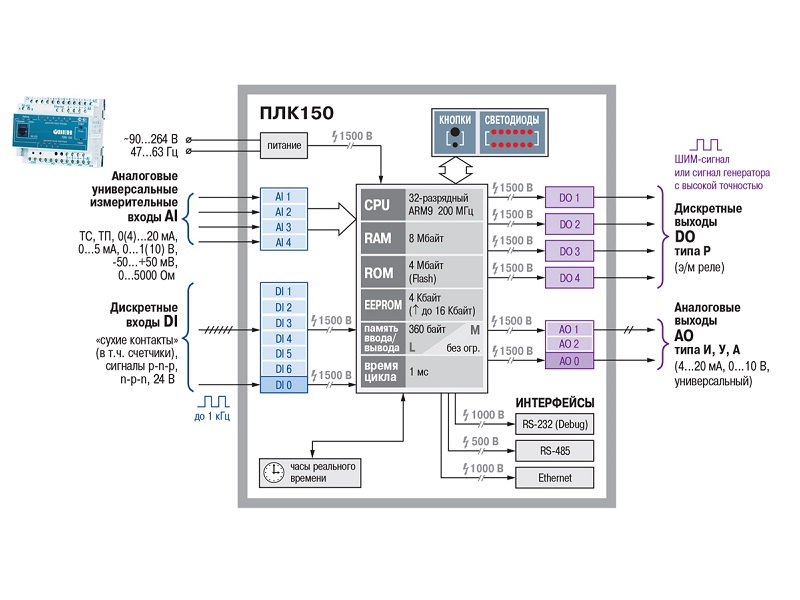
В автоматизированных системах вместо компьютера или одновременно с ним часто используют программируемый логический контроллер (ПЛК). Типовыми отличиями ПЛК от компьютера является специальное конструктивное исполнение (для монтажа в стойку, панель, на стену или в технологическое оборудование), отсутствие механического жесткого диска, дисплея и клавиатуры. Контроллеры также имеют малые размеры, расширенный температурный диапазон, повышенную стойкость к вибрации и электромагнитным излучениям, низкое энергопотребление, защищены от воздействий пыли и воды, содержат сторожевой таймер и платы аналогового и дискретного ввода-вывода, имеют увеличенное количество коммуникационных портов. В контролерах, в отличие от компьютеров, как правило, используется операционная система реального времени.
Устройства вывода (модули вывода) позволяют выводить дискретные, частотные или аналоговые сигналы. Дискретные сигналы используются, например, для включения электродвигателей, электрических нагревателей, для управления клапанами, фрамугами, насосами и другими исполнительными устройствами. Частотный сигнал используется обычно для управления средней мощностью устройств с большой инерционностью с помощью широтно-импульсной модуляции.
Архитектура автоматизированной системы – это наиболее абстрактное ее представление, которое включает в себя идеализированные модели компонентов системы, а также модели взаимодействий между компонентами. Элементы архитектуры находятся во взаимосвязи, образуя единую автоматизированную систему и обеспечивая решение поставленной задачи автоматизации на архитектурном уровне. В то же время архитектура оставляет достаточно свободы для выбора конкретных технических решений. Поэтому правильно спроектированная архитектура допускает множество технических реализаций путем выбора различных компонентов архитектуры и методов взаимодействия между ними.
Элементами архитектуры являются модели (абстракции) датчиков, устройств ввода-вывода, измерительных преобразователей, ПЛК, компьютеров, интерфейсов, протоколов, промышленных сетей, исполнительных устройств, драйверов, каналов передачи информации.
Архитектура системы может быть различной в зависимости от решаемой задачи автоматизации. Такими задачами могут быть:
Построение любой автоматизированной сиситемы управления начинается с декомпозиции (деления на части) системы на подсистемы. Декомпозиция может быть функциональной (алгоритмической) или объектной.
При объектной декомпозиции используются распределенные системы управления, когда каждый объект автоматизации оборудуется локальным технологическим контроллером, решающим задачи в пределах этого объекта. При функциональной декомпозиции систему автоматизации делят на части, группируя сходные функции, и для каждой группы функций используют отдельный контролер. Оба вида декомпозиции могут быть использованы совместно. Выбор способов декомпозиции является творческим процессом и во многом определяет эффективность будущей системы.
Объектная декомпозиция объекта автоматизации используется в современных SCADA-пакетах. Она аналогична объектной декомпозиции, используемой в объектно-ориентированном программировании (ООП), основными признаками которой являются абстрагирование, инкапсуляция, модульность, иерархическая организация. Классам ООП соответствуют контроллеры (ПЛК), объектам – контроллеры с заданными свойствами (параметрами), инкапсуляция соответствует сокрытию конкретной реализации (например, с помощью функциональных блоков языка IEC 61131-3); благодаря инкапсуляции существенно упрощается структура системы с точки зрения системного интегратора и тем самым уменьшается количество возможных ошибок. Модульность обеспечивается модульностью аппаратного обеспечения системы, иерархичность естественным путем вытекает из требований заказчика.
Независимо от метода декомпозиции, основным ее результатом должно быть представление системы в виде набора слабо связанных частей. Слабая связь между частями системы означает отсутствие между ними обратных связей или малость модуля петлевого усиления при наличии таких связей, а также отсутствие интенсивного обмена информацией.
Системы управления с многоуровневой архитектурой обычно строятся по объектному принципу, когда структура системы выбирается подобной структуре объекта автоматизации, а каждая подсистема является локальной, т.е. все обратные связи замкнуты в пределах этой подсистемы. Каждая локальная подсистема выполняет отдельную функцию, задаваемую логикой функционирования всей системы. Объектный принцип построения позволяет упростить проектирование многоуровневой системы и обеспечить ее структурную (архитектурную) надежность.
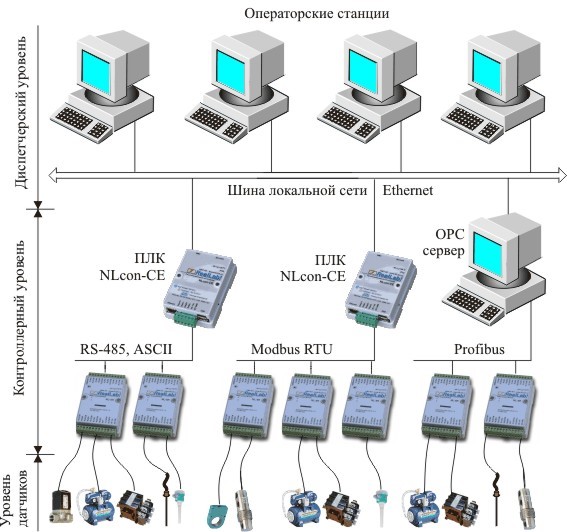
Анализ сложных систем управления позволяет выделить в них несколько однородных уровней иерархии.
Низший (нулевой) уровень включает в себя датчики и исполнительные устройства (актуаторы): датчики температуры, давления, концевые выключатели, дискретные датчики наличия напряжения, измерительные трансформаторы, реле-пускатели, контакторы, электромагнитные клапаны, электроприводы и др.
Первый уровень состоит из программируемых логических контроллеров и модулей аналого-цифрового и дискретного ввода-вывода, которые обмениваются информацией по промышленной сети типа Modbus RTU, Modbus TCP, Profibus и др. Иногда модули ввода-вывода выделяют в отдельный уровень иерархии.
Второй (диспетчерский) уровень состоит из рабочих станций - компьютеров с человеко-машинным интерфейсом (HMI – Human Machine Interface), наиболее распространенными вариантами которого являются SCADA-пакеты. Диспетчер (оператор) осуществляет наблюдение за ходом технологического процесса или управление им с помощью мнемосхемы на экране монитора компьютера. Диспетчерский компьютер выполняет также архивирование собранных данных, записывает действия оператора, анализирует сигналы системы технической диагностики, данные аварийной и технологической сигнализации, сигналы срабатывания устройств противоаварийных защит, а также выполняет часть алгоритмов управления технологическим процессом. Благодаря объединению диспетчерских компьютеров в сеть наблюдение за процессами может быть выполнено с любого компьютера сети, но управление, во избежание конфликтов, допускается только с одного компьютера или функции управления разделяются между несколькими компьютерами. Права операторов устанавливаются средствами ограничения доступа сетевого сервера. Важной частью второго уровня являются также базы данных реального времени, являющиеся хранилищами информации и средством обмена с третьим уровнем иерархии системы управления.
Третий уровень (уровень управления цехом) появляется как средство интеграции системы АСУ ТП с АСУП – автоматизированной системой управления предприятием. АСУП, в зависимости от размеров корпорации, может включать еще более высокий (четвертый) уровень и обеспечивать интеграцию с высшим руководством, которое может быть расположено в различных странах и на разных континентах земного шара. На уровне АСУП решаются следующие задачи: