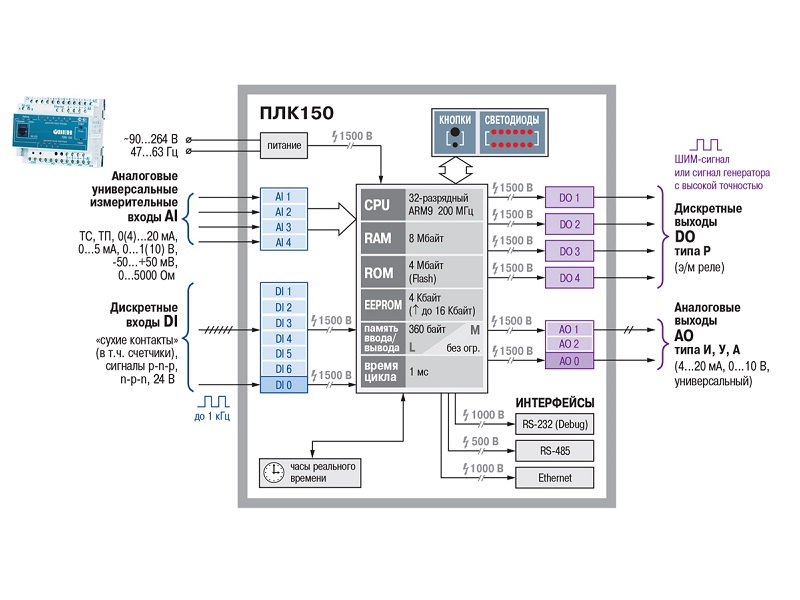
Логические устройства, в соответствии с заданными пользователем параметрами, формируют сигналы управления, которые через выходные устройства прибора (реле, транзисторные ключи и т.п.) подаются на исполнительные механизмы.
Режим работы логического устройства может быть одним из следующих: двухпозиционный регулятор (ON/OFF, компаратор) (тип выхода – дискретный (Р, К, С, Т, С3)), аналоговый П-регулятор (тип выхода – аналоговый: ЦАП 4...20 мА (И) или 0...10 В (У)), ПИД-регулятор (тип выхода – дискретный (Р, К, С, Т, С3) или аналоговый (И, У)) и регистратор (измеритель-регистратор) (тип выхода – ЦАП 4...20 мА (И)).
Двухпозиционный регулятор (компаратор) сравнивает значение измеренной величины с эталонным (уставкой). Состояние выходного сигнала изменяется на противоположное, если входной сигнал (измеренная величина) пересекает пороговый уровень (уставку).
В режиме двухпозиционного регулятора (компаратора) логическое устройство сравнивает значение входной величины с уставками и выдает управляющий сигнал на выходное устройство в соответствии с заданной логикой.
Выходной сигнал двухпозиционного регулятора может иметь только два значения: максимальное и минимальное. Одно из них включает, а другое выключает выходное устройство.
Поэтому для работы логического устройства в режиме двухпозиционного регулятора требуется выходное устройство дискретного типа (э/м реле, транзисторная оптопара, оптосимистор, выход для управления внешним твердотельным реле).
Тип логики двухпозиционного регулятора, уставка $T_{уст}$ и гистерезис $Δ$ задаются пользователем при программировании прибора.
Двухпозиционный регулятор используется:
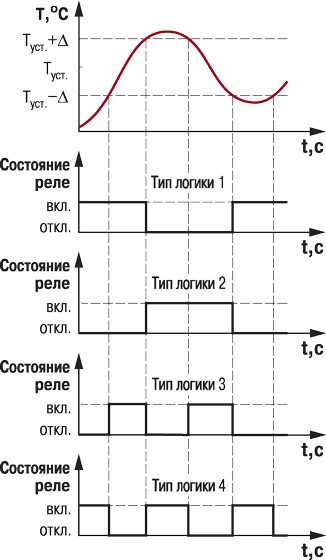
В приборах обычно реализованы 4 типа логики двухпозиционного регулятора (ON/OFF, компаратора).
Тип логики 1 (прямой гистерезис). Применяется в случае использования прибора для управления работой нагревателя (например, ТЭНа) или сигнализации о том, что значение текущего измерения $T$ меньше уставки $T_{уст}$. При этом выходное устройство, подключенное к логическому устройству, первоначально включается при значениях $T < T_{уст}-∆$, выключается при $T > T_{уст}+∆$ и вновь включается при $T < T_{уст}-∆$, осуществляя тем самым двухпозиционное регулирование температуры объекта по уставке $T_{уст}$ с гистерезисом $±Δ$.
Тип логики 2 (обратный гистерезис). Применяется в случае использования прибора для управления работой охладителя (например, вентилятора) или сигнализации о превышении значения уставки. При этом выходное устройство первоначально включается при значениях $T > T_{уст}+∆$, выключается при $T < T_{уст}-∆$ и вновь включается при $T > T_{уст}+∆$, также осуществляя двухпозиционное регулирование.
Тип логики 3 (П-образная). Применяется при использовании прибора для сигнализации о входе контролируемой величины в заданные границы. При этом выходное устройство включается при $T_{уст}-∆ < T < T_{уст}+∆$.
Тип логики 4 (U-образная). Применяется при использовании прибора для сигнализации о выходе контролируемой величины за заданные границы. При этом выходное устройство включается при $T < T_{уст}-∆$ и $T > T_{уст}+∆$.
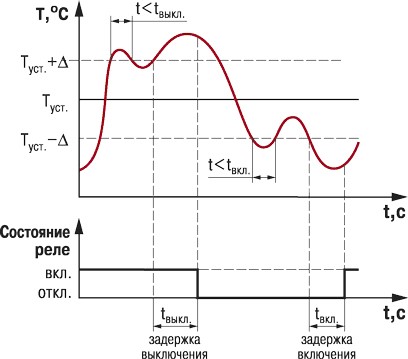
Для защиты выходного устройства от частых срабатываний при работе логического устройства в режиме компаратора, во многих приборах имеются параметры для установки времени задержки включения $t_{вкл}$ и времени задержки выключения $t_{выкл}$ выходного устройства. Логическое устройство включает (выключает) выходное устройство, если условие, вызывающее изменение состояния, сохраняется, как минимум, в течение времени, установленного в этих параметрах.
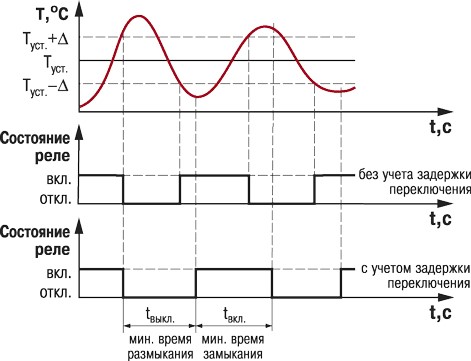
Для аварийной сигнализации о выходе параметра за установленные границы во многих приборах можно задать минимальное время удержания выхода в замкнутом и разомкнутом состоянии. Логическое устройство удерживает выходное устройство в соответствующем состоянии в течение заданного времени, даже если по логике работы устройства сравнения требуется переключение.
Регулятор – устройство, предназначенное для поддержания контролируемой величины на заданном уровне.
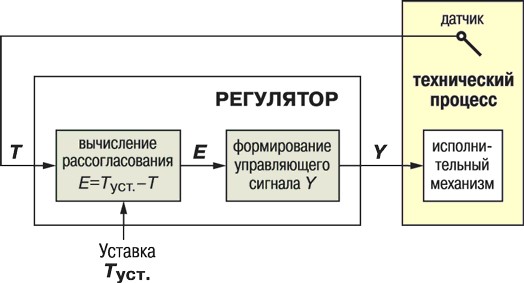
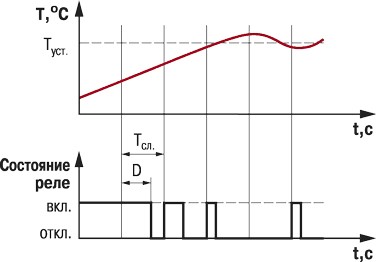
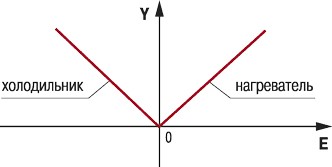
В режиме аналогового регулирования логическое устройство рассчитывает отклонение $E$ текущего значения контролируемой величины $T$ от заданной уставки $T_{уст}$ (т.е. рассогласование). В результате на выходе регулятора вырабатывается аналоговый сигнал $Y$, который направлен на уменьшение рассогласования $E$. Этот сигнал подается на исполнительное устройство регулятора в виде тока или последовательности импульсов (ШИМ).
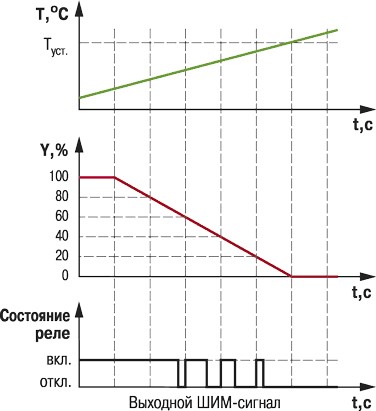
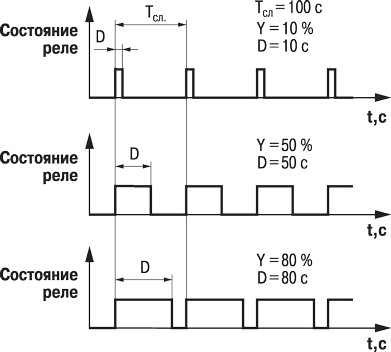
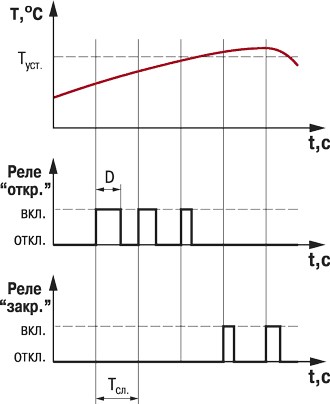
Если выходное устройство регулятора дискретного типа (реле, транзисторная или симисторная оптопара, выход для управления твердотельным реле), выходной сигнал преобразуется в последовательность управляющих импульсов с длительностью $D$:
$$D=Y·\frac{T_{сл}}{100%}.$$где $D$ – длительность импульса, с; $T_{сл}$ – период следования импульсов, с (задается пользователем при программировании); $Y$ – выходной сигнал регулятора.
Если в качестве выходного устройства используется ЦАП, выходной сигнал преобразуется в пропорциональный ему ток 4...20 мА или напряжение 0...10 В.
В выходных импульсах присутствуют все три составляющие ПИД - пропорциональная, дифференциальная, интегральная.
Для поддержания заданного значения регулируемого параметра при работе логического устройства в режиме «Регулятор» можно использовать разные типы исполнительных устройств, но все они могут быть условно разделены на две группы: нагреватели и холодильники.
Нагревателем условно называют устройство, включение которого должно приводить к увеличению значения измеряемого параметра.
Холодильником называют устройство, включение которого должно приводить к уменьшению значения измеряемого параметра.
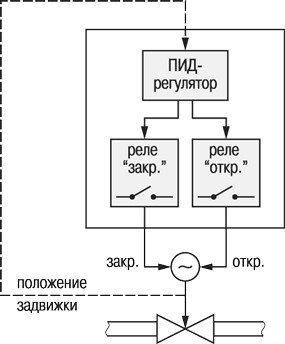
Кроме того, в некоторых ПИД-регуляторах существует специальный режим для управления устройствами типа «задвижка». Задвижка, в свою очередь, тоже может управлять либо нагревателем, либо холодильником.
Нагреватель. Управление процессом при помощи устройств данного типа предполагает, что с увеличением значения выходного сигнала $Y$ увеличивается значение регулируемого параметра.
Холодильник. Управление процессом при помощи устройств данного типа предполагает, что с увеличением значения выходного сигнала $Y$ уменьшается значение регулируемого параметра.
Одновременное управление нагревателем и холодильником. Для поддержания регулируемой величины регулятор управляет двумя исполнительными устройствами – нагревателем и холодильником. Если в момент включения регулятора значение регулируемого параметра меньше заданного, регулятор включает нагреватель и использует это устройство до тех пор, пока величина выходного сигнала $Y$ не поменяет знак на противоположный. После этого регулятор включает холодильник.
Особенности работы ПИД-регулятора при управлении задвижкой (позиционно-пропорциональное регулирование). Устройство типа «задвижка» имеет электрический привод и две пары контактов для управления направлением ее вращения. Это устройство управляется только импульсными сигналами. При подаче управляющих импульсов на первую пару контактов задвижка перемещается в одну сторону, например, открывается, при подаче импульсов на вторую – закрывается.
Если задвижка имеет датчик положения, то регулятор вычисляет выходной сигнал $Y$ (положение задвижки в процентах) и перемещает задвижку в нужное положение. При вычислении $Y$ в формулу для ПИД-регулятора вносятся коррективы. Считается, что двигатель задвижки – это «интегрирующее звено», и регулятором производится дополнительное дифференцирование выходного сигнала. В этом случае постоянная времени дифференцирования не учитывается, даже если она была ранее установлена. Пропорциональная и интегральная составляющие действуют так же, как при управлении нагревателем (холодильником).
Если датчик положения отсутствует, то регулятор вычисляет среднюю скорость перемещения задвижки по формуле:
$$v_{ср}=\frac{1}{X_p}·\left(∆E_i+\frac{1}{τ_и}·E_i\right),$$где $X_p$ – полоса пропорциональности, $E_i$ – рассогласование (отклонение); $∆E_i$ – разность между двумя соседними измерениями $E_i$ и $E_{i-1}$; $τ_и$ – постоянная времени интегрирования.
Длительность управляющих импульсов при этом определяется по формуле:
$$D=v_{ср}·T_{сл}.$$где $D$ – длительность импульсов; $T_{сл}$ – период следования импульсов.
Задвижка может работать и в режиме нагревателя, и в режиме холодильника.
Измеритель-регистратор (Регистратор)
Измеритель-регистратор (или просто Регистратор) – устройство, предназначенное для преобразования измеренной величины в аналоговый сигнал тока 4...20 мА.
При работе в режиме «измеритель-регистратор» логическое устройство преобразует входную величину в аналоговый сигнал в виде тока 4…20 мА, который можно подавать на самописец или другое регистрирующее устройство.
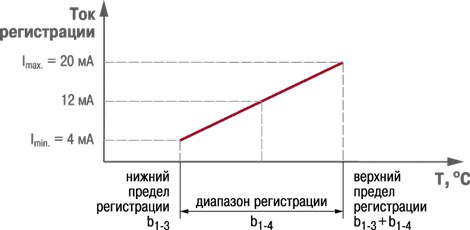
При программировании прибора устанавливаются два параметра. Первый параметр – значение нижнего предела, соответствующее минимальному значению тока. Вторым параметром для разных приборов может быть либо диапазон регистрации, либо значение верхнего предела, соответствующее максимальному значению тока.