Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще – с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем – специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования.
ПЛК используются практически во всех сферах человеческой деятельности для автоматизации технологических процессов, в системах противоаварийной защиты и сигнализации, в станках с ЧПУ, для управления дорожным движением, в системах жизнеобеспечения зданий, для сбора и архивирования данных, в системах охраны, в медицинском оборудовании, для управления роботами, в системах связи, при постановке физического эксперимента, для управления космическими кораблями, для автоматизации испытаний продукции и т. д. Тем не менее, до сих пор остается много отраслей экономики, куда контроллерная автоматизация только начинает проникать.
Контроллеры используются не только как автономные средства локального управления технологическим установками, но и в составе широкомасштабных систем автоматизированного управления целыми предприятиями.
В настоящее время на Российском рынке преобладают контроллеры иностранных фирм: Siemens, Mitsubishi, ABB, Schneider Electric, GE Fanuc, однако с течением времени увеличивается доля рынка, занятая отечественной продукцией Российских фирм (Овен, Элемер и др.)
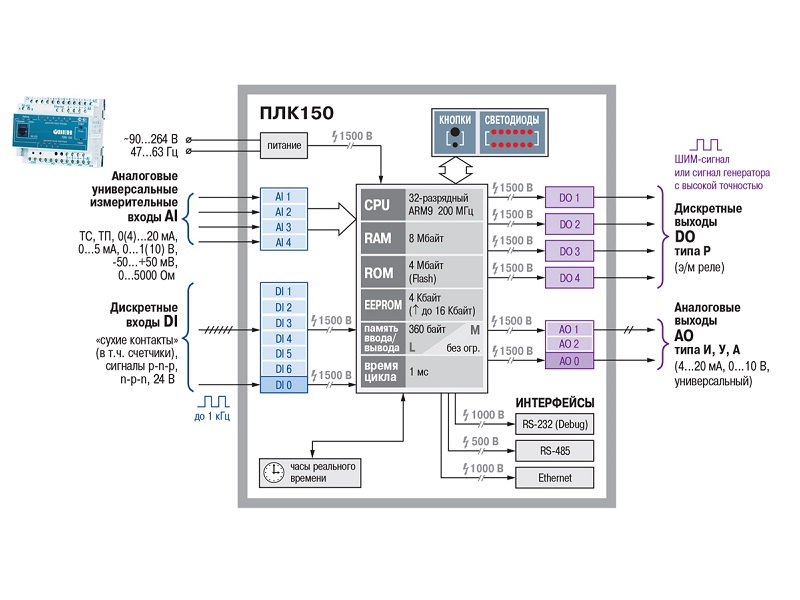
Типовой состав ПЛК включает центральный процессор, память, сетевые интерфейсы и устройства ввода-вывода. Иногда эта конфигурация дополняется устройством для программирования и пультом оператора, устройствами индикации, реже – принтером, клавиатурой, мышью или трекболом.
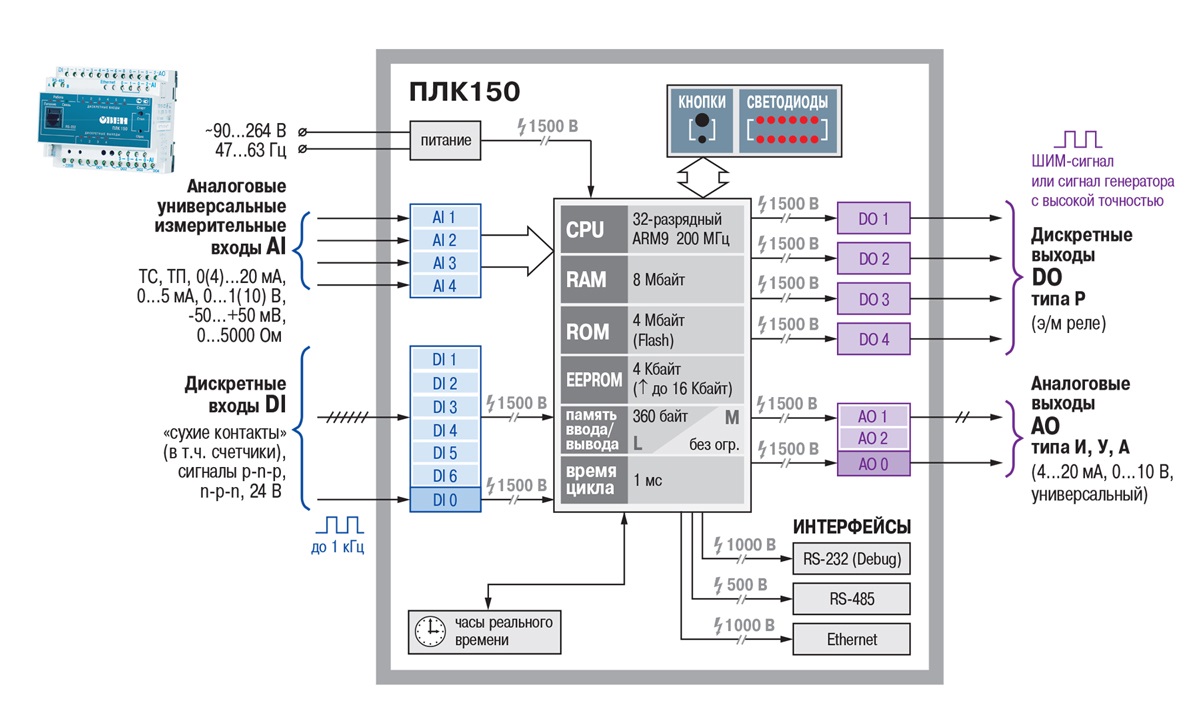
Процессорный модуль включает в себя микропроцессор (центральное процессорное устройство – ЦПУ), запоминающие устройства, часы реального времени и сторожевой таймер. Основными характеристиками микропроцессора являются разрядность (в ПЛК используются 8-ми, 16-ти и 32-разрядные микропроцессоры), тактовая частота, архитектура, наличие операций с плавающей точкой, типы поддерживаемых портов ввода-вывода, температурный диапазон работоспособности и потребляемая мощность.
Производительность микропроцессоров с одной и той же архитектурой пропорциональна тактовой частоте. Большинство контроллеров используют микропроцессоры с сокращенным набором команд (RISC - Reduced Instruction Set Computing), в которых используется небольшое количество команд одинаковой длины и большое количество регистров. Сокращенный набор команд позволяет строить более эффективные компиляторы и конвейер процессора, способный за каждый такт выдавать результат исполнения очередной команды.
Для контроллеров, выполняющих интенсивную математическую обработку данных, важно наличие математического сопроцессора (вспомогательного процессора, выполняющего операции с плавающей точкой) или сигнальных процессоров, в которых операции типа $Y=A·Х+В$ выполняются за один такт. Сигнальные процессоры позволяют ускорить выполнение операций свертки или быстрого преобразования Фурье.
Емкость памяти определяет количество переменных (тегов), которые могут быть обработаны в процессе функционирования ПЛК. В микропроцессорах время доступа к памяти является одним из существенных факторов, ограничивающих быстродействие. Поэтому память делят на несколько уровней иерархии, в зависимости от частоты использования хранящихся в ней данных и быстродействия. Иерархия памяти относится к существенным характеристиками архитектуры процессора, поскольку она позволяет снизить отрицательное влияние медленной памяти на быстродействие микропроцессора. Основными типами памяти является постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и набор регистров. Регистры являются самыми быстродействующими элементами памяти, поскольку они используются арифметико-логическим устройством (АЛУ) для исполнения элементарных команд процессора. ПЗУ используют для хранения редко изменяемой информации, такой, как операционная система, драйверы устройств, загрузчик, исполняемый модуль программы пользователя. ОЗУ используется для хранения данных, которые многократно изменяются в процессе работы контроллера, например, значения тегов, результаты промежуточных вычислений, диагностическая информация, массивы, выводимые на графики, данные для отображения на дисплее.
В качестве ПЗУ (или ROM – "Read Only Memory") обычно используется электрически стираемая перепрограммируемая память (EEPROM – "Electrically Erasable Programmable ROM". Разновидностью EEPROM является флэш-память, принцип действия которой основан на хранении заряда в конденсаторе, образованном плавающим затвором и подложкой МОП-транзистора. Особенностью флэш-памяти является ее энергонезависимость, т.е. сохраняемость данных при выключенном питании. Стирание и перезапись во флэш-памяти выполняется не отдельными ячейками, а большими блоками, поэтому она получила название, происходящее от английского "flash" - "вспышка" . Недостатком всех ПЗУ является низкое быстродействие.
Количество циклов записи информации во флэш-память ограничено и составляет несколько десятков тысяч раз. По конструктивному исполнению и интерфейсам флэш-память подразделяется на Compact Flash (CF), Memory Stick, Secure Digital (SD), MuliMediaCard (MMC), RS-MMC, SmartMedia Card (SMC), USB-flash. Флэш-память может быть впаяна в печатную плату или быть съемной.
В качестве ОЗУ современные микропроцессоры используют статическую память (SRAM – Static Random Access Memory) и динамическую (DRAM – "Dynamic Random Access Memory"), SDRAM ("Synchronous DRAM"). SRAM выполняется на триггерах, информация в которых сохраняется неограниченно долго при наличии питания. В динамической памяти информация хранится на конденсаторах и поэтому DRAM требует периодической регенерации (перезарядки конденсаторов). К недостаткам триггерной памяти относится ее высокая стоимость, связанная с низкой плотностью компоновки триггеров на кристалле, и малое отношение емкости к цене. Достоинством является высокое быстродействие, достигающее гигагерц, в то время как память на конденсаторах не может работать на частотах выше сотен герц. Оба типа памяти (DRAM и SRAM) не могут сохранять информацию при отключении питания ПЛК. Поэтому некоторые типы ПЛК используют батарейное питание памяти для сохранения работоспособности системы автоматизации после кратковременного прерывания питания.
Моноблочные и модульные контроллеры используют, как правило, параллельную шину для обмена данными с модулями ввода-вывода, что позволяет на порядок повысить быстродействие их опроса по сравнению с последовательной шиной. Параллельные шины могут быть стандартными (ISA, PC/104, PCI, ComactPCI, VME, CXM) или частнофирменными. Последовательная шина контроллера (на основе интерфейса RS-485) используется для подключения к нему удаленных (распределенных) модулей ввода-вывода.
Программирование контроллеров малой мощности выполняется с помощью кнопок, расположенных на лицевой панели или с помощью переносного пульта для программирования. В качестве пульта в последнее время используется компьютер формата "ноутбук". Программирование мощных контроллеров выполняется с помощью персонального компьютера, на котором устанавливается специальное программное обеспечение, например CoDeSys или ISaGRAF, выполняющее трансляцию технологического языка стандарта МЭК 61131-3 в исполняемый код процессора, который загружается в ПЗУ ПЛК, например, через порт Ethernet.
Сторожевой таймер (Watchdog Timer – WDT) представляет собой счетчик, который считает импульсы тактового генератора и в нормальном режиме периодически сбрасывается (перезапускается) работающим процессором. Если процессор "зависает", то сигналы сброса не поступают в счетчик, он продолжает считать и при достижении некоторого порога вырабатывает сигнал "Сброс" для перезапуска "зависшего" процессора.
Часы реального времени (РВ) представляют собой кварцевые часы, которые питаются от батарейки и поэтому продолжают идти при выключенном ПЛК. Часы РВ используются, например, для управления уличным освещением в зависимости от времени суток, в системах охраны объектов и других случаях, когда необходима привязка данных или событий к астрономическому времени.
Стандартными напряжениями питания ПЛК являются напряжения 12 В, 24 и 48 В. Источником электрической энергии обычно является промышленная сеть 220В, 50 Гц. В случае распределенных систем автоматизации источник питания может быть расположен вдали от ПЛК, поэтому напряжение на клеммах ПЛК или модулей ввода-вывода может сильно отличаться от напряжения источника питания вследствие падения напряжения на сопротивлении кабеля. Для решения этой проблемы каждый ПЛК или каждый модуль удаленного ввода снабжаются встроенным стабилизатором напряжения, который обеспечивает нормальное их функционирование в диапазоне напряжений от 10 до 30 В.
Низкое напряжение питания позволяет питать контроллеры от аккумуляторов бортовых сетей транспортных средств или переносных аккумуляторов.

Входы – служат для подключения к прибору различных типов датчиков; блок обработки входного сигнала – включает коррекцию показаний датчиков, цифровые фильтры, вычислители дополнительных величин (разности, отношения и т. п.); логические устройства – формируют управляющие сигналы для выходных устройств; выходные устройства – служат для передачи регистрирующих или управляющих сигналов на исполнительные механизмы.