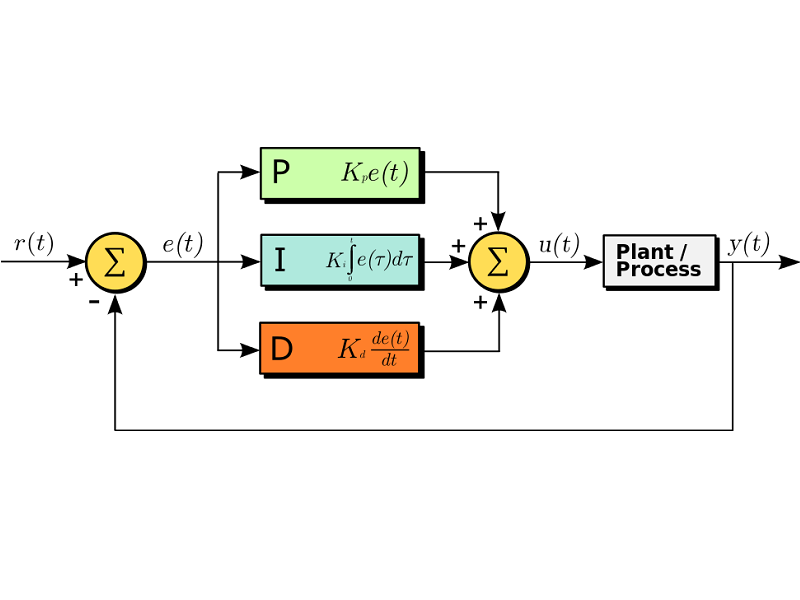
Простейший регулятор – пропорциональный или П-регулятор – это простой усилитель с передаточной функцией $C(s)=K$. Его выход – это ошибка управления $e(t)$, умноженная на коэффициент $K$. С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку.
Переходный процесс в контуре с П-регулятором при разных K показан на рисунке ниже.
При малых система имеет малое перерегулирование, но большую статическую погрешность (при $K=1$ погрешность составляет 50%). С ростом $K$ погрешность уменьшается, но возрастает перерегулирование.
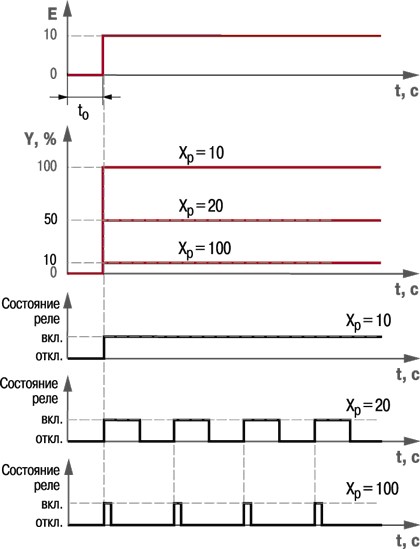
При цифровой реализации П-закона регулирования выходной сигнал регулятора $Y_i$ пропорционален величине рассогласования $E_i$, т.е.
$$Y_i=\frac{1}{X_p}·E_i·100%.$$где $X_p$ – полоса пропорциональности, в пределах которой справедлива эта формула; $E_i$ – разность между заданным $Т_уст$ и текущей $Т_i$ значениями измеряемой величины или рассогласование.
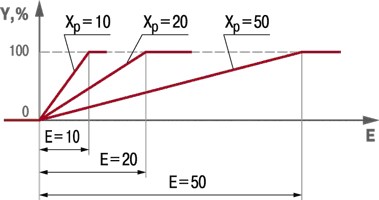
Полоса пропорциональности $X_p$, как и отклонение $E$, выражается в единицах контролируемого параметра. Чем шире полоса пропорциональности $X_p$, тем меньше величина выходного сигнала $Y$ при одном и том же отклонении $E$. Вне полосы пропорциональности выходной сигнал $Y$ равен 0 или 100 %.
При действии П-закона совместно с реле регулятор выдает импульсы, в которых присутствует только пропорциональная составляющая величины выходного сигнала.