Выбор критерия качества регулирования зависит от цели, для которой используется регулятор. Для классического ПИД-регулятора параметры, которые являются наилучшими для слежения за уставкой, в общем случае отличаются от параметров, наилучших для ослабления влияния внешних возмущений. Например, точное слежение за изменением уставки необходимо в системах управления движением, в робототехнике. В системах управления технологическими процессами, где уставка обычно остается длительное время без изменений, требуется максимальное ослабление влияния нагрузки (внешних возмущений).
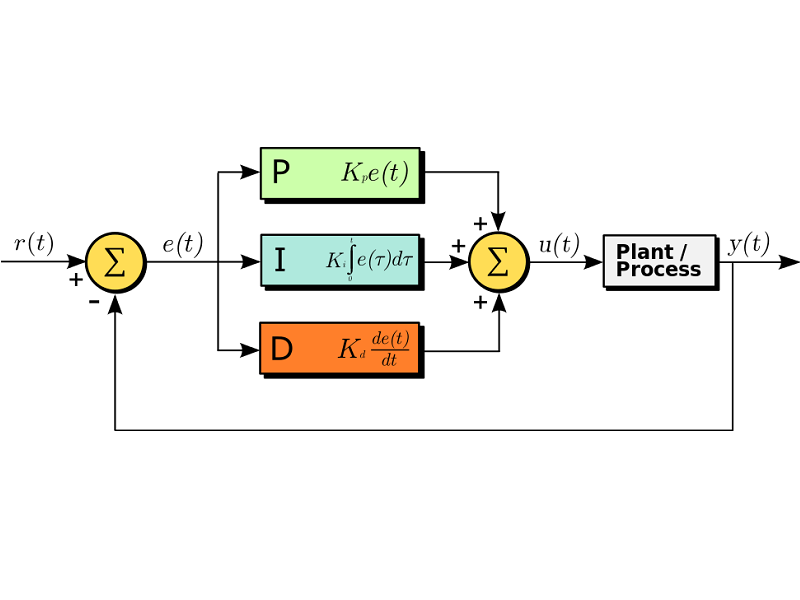
Зона нечувствительности $X_d$. Для исключения излишних срабатываний регулятора при небольшом значении рассогласования $E_i$ для вычисления значений $Y_i$ используется уточненное значение $E_p$, вычисленное в соответствии с условиями: если $|E_i | ≤ X_d$, то $E_p=0$; если $E_i > X_d$, то $E_p=E_i-X_d$; если $E_i < -X_d$, то $E_p=E_i-X_d$, где $X_d$ – зона нечувствительности.
Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.
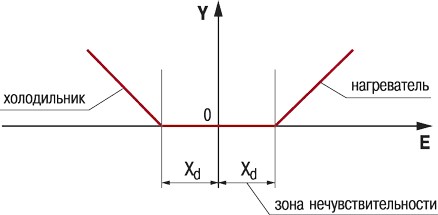
Ограничение управляющего сигнала. Так как рабочий диапазон исполнительного механизма всегда ограничен, для выходного управляющего сигнала $Y_{вых}$ задаются ограничения в виде максимального и минимального значений. Если выходной сигнал регулятора $Y$ превышает заданную величину $Y_{огр.max}$, то на исполнительное устройство выдается сигнал $Y_{огр.max}$, если сигнал меньше заданной величины $Y_{огр.min}$, то выдается сигнал $Y_{огр.min}$.
Кроме того, в некоторых регуляторах можно задать скорость изменения выходного сигнала, что позволяет избежать резких воздействий на исполнительные устройства.
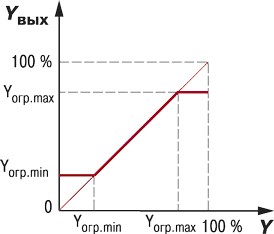
Зона накопления интеграла. Если рассогласование Е долго сохраняет знак, величина интегральной составляющей становится очень большой (эффект интегрального насыщения), что может привести к перерегулированию.
Для устранения влияния этого эффекта задают зону накопления интеграла, в пределах которой регулятор вычисляет интегральную составляющую. За пределами этой зоны, где интегральная сумма слишком велика, для формирования управляющего сигнала используется только пропорциональная составляющая. В зависимости от режима работы регулятора (нагреватель или холодильник), эта зона расположена выше или ниже уставки. Если регулятор управляет задвижкой без датчика положения, значение этого параметра не влияет на работу регулятора.
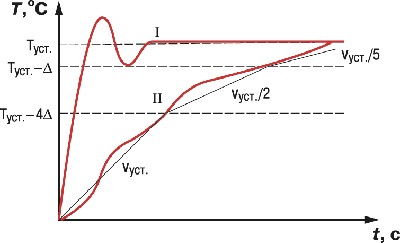
Ограничение скорости выхода на уставку. Ограничение скорости выхода контролируемой величины на заданное значение используется для предотвращения перерегулирования при запуске системы (кривая I). Фиксированное значение уставки заменяют на «плавающее», которое постепенно приближают к значению $Т_{уст}$ (кривая II). Приближение происходит сначала со скоростью $v_{уст}$, затем скорость постепенно уменьшается. Рекомендуемое значение $v_{уст}$ определяется прибором при автонастройке и обеспечивает первоначальную величину перерегулирования (первого «выбега») не более $Δ$.
При использовании скорости выхода на уставку возрастает время выхода на рабочий режим. Поэтому если задержка приводит к неудовлетворительным результатам, нужно увеличить $v_{уст}$ или отключить действие параметра.
Период управляющих импульсов $T_{сл}$. При использовании ПИД-регулятора с выходным устройством ключевого типа (э/м реле, транзисторная или симисторная оптопара) необходимо устанавливать период управляющих импульсов. Чем выше частота управляющих импульсов (т. е. меньше период $T_{сл}$), тем быстрее реакция регулятора на внешние возмущения.
В идеале частота импульсов управления должна совпадать с частотой опроса датчика. Однако, если при использовании на выходе ПИД-регулятора электромагнитного реле или пускателя установить слишком большую частоту (т. е. слишком низкое значение $T_{сл}$), то частые переключения приведут к быстрому износу силовых контактов.
Поэтому значение $T_{сл}$ приходится увеличивать, но необходимо понимать, что качество регулирования при этом может ухудшиться.
При использовании в качестве выходных устройств электронных ключей (транзисторных или симисторных оптопар) проблемы износа контактов не возникает и значение $T_{сл}$ можно установить равным периоду опроса датчика.